|
|
5 years ago | |
|---|---|---|
| camera module | 5 years ago | |
| screenshots | 5 years ago | |
| tracking and telemetry | 5 years ago | |
| README.md | 5 years ago | |
README.md
Talos_Drones_Tracking_and_Telemetry
Γεώργιος Γεροντάκης - 43827
Στυλιανός Γιακουμίδης - 43995

Περιγραφή του Project
Στο συγκεκριμένο project υλοποιούμε ένα σύστημα οπτικής καταγραφής πτήσεων και τηλεμετρίας για μη επανδρωμένα αεροσκάφη.
Το Project αυτό δημιουργήθηκε σε συνεννόηση με την ομάδα Έρευνας μη Επανδρωμένων συστημάτων TALOS του Πανεπιστημίου Δυτικής Αττικής και προορίζεται για χρήση σε πειραματικές πτήσεις drones
Camera Module
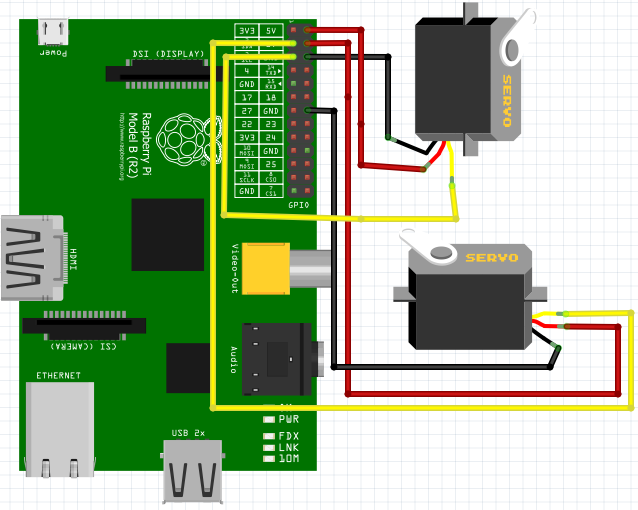
- Για την οπτική καταγραφή χρησιμοποιείται μια κάμερα η οποία είναι τοποθετημένη πάνω σε ένα tilt και εχει τη δυνατοτητα περιστροφής 180 μοιρών αριστερά-δεξιά ( ο ένας servo) και πάνω - κάτω ( ο δεύτερος servo).
- Η κάμερα με το servo tilt συνδέεται με ένα raspberry pi (3 Model B+) και στο raspberry pi αυτό τρέχει ένας "δαίμονας" ο οποίος είναι υπεύθυνος για τη λήψη στιγμιότυπων από τη κάμερα πάνω στο tilt και μετά από επεξεργασία του στιγμιότυπου αυτού (με OpenCV) είναι σε θέση να βγάλει συμπεράσματα σχετικά με τη τοποθεσία του μη επανδρωμένου αεροσκάφους ως προς τη κάμερα. Στη συνέχεια ελέγχει τους 2 servo έτσι ώστε να ακολουθεί το drone. Τέλος, κάνει streaming της τελικής εικόνας στο Client του project ο οποίος έχει συνδεθεί. (Για τη συνεχεία της εργασίας θα αναφερόμαστε σε όλο αυτό το σύστημα με τη κάμερα το servo tilt και την υπηρεσία επεξεργασίας και streaming ως "Camera Module")
Συνδεσμολογία Camera Module
Εφαρμογή Χρήστη
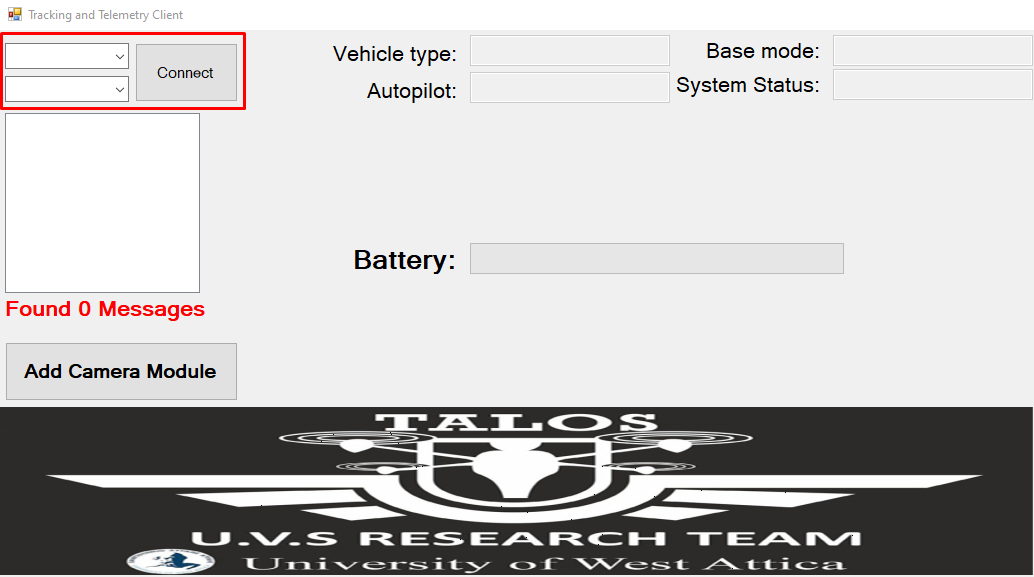
Για την απεικόνιση των πληροφοριών από τη τηλεμετρία και τη προβολή των πλάνων από το Camera Module δημιουργήθηκε εφαρμογή σε C# η οποία κάνει χρήση του πρωτοκόλλου MAVLink για τη παροχή τη τηλεμετρία.

Ο χρήστης της εφαρμογής μπορεί να έχει πρόσβαση στο Camera Module επιλέγοντας πατώντας το κουμπί "Add Camera Module" και εισάγοντας την διεύθυνση του.

Μέσω της εφαρμογής έχουμε τη δυνατοτητα:
- Εμφάνισης των μηνυμάτων τηλεμετρίας που στέλνονται από το drone στο δέκτη.
- Προσθήκης του Camera Module ετσι ώστε ο χρήστης να έχει και οπτική επαφή με το drone.
- Εμφάνισης πληροφοριών του drone σχετικά με το τύπο του, τον αυτόματο πιλότο, το base mode και τη κατάσταση στην οποία βρίσκεται.
- Εντοπισμός σε πραγματικού χρόνο του drone και καταγραφή της πορείας του σε χάρτη.
- Προβολής μπαταρίας που απομένει και ηχητική ειδοποίηση του χρήστη όταν αυτή φτάσει στη μέση και όταν τελειώνει με εντονότερη ηχητική ειδοποίηση.
Τα παραπανω έχουν δημιουργηθεί αποκλειστικά και μόνο για τους σκοπούς της παρουσίασης ενώ το Project θα συνεχίσει να αναπτύσσεται στο μέλλον μεχρι τη μόνιμη ενσωμάτωση του στα project της ομάδας TALOS
Τηλεμετρία
Για τη τηλεμετρία χρησιμοποιούμε ένα module ραδιο-τηλεμετρίας στα 433Mhz αφού πρώτα έχουμε εγκαταστήσει τους κατάλληλους drivers.

Ωστόσο δεν έχει σημασία με ποιο τρόπο γίνεται η ζεύξη του χρήστη με το drone για την επικοινωνία, καθώς κοινός παρονομαστής για την επικοινωνία το πρωτόκολλο MAVLink.
Χρήση του Project
Αφού η συνδεσμολογία του servo tilt με το development board είναι σωστή, τρέχουμε στο development board
sudo ./setup.sh
ώστε να εγκατασταθούν τα απαραιτητα για την εκκίνηση του δαίμονα στο camera module.
Στην εφαρμογή χρήστη κάνουμε κλικ στο κουμπί "Add Camera Module" , και στη συνέχεια στη νέα φόρμα που άνοιξε συμπληρώνουμε τις απαραίτητες για τη σύνδεση πληροφορίες και πατάμε "Connect".
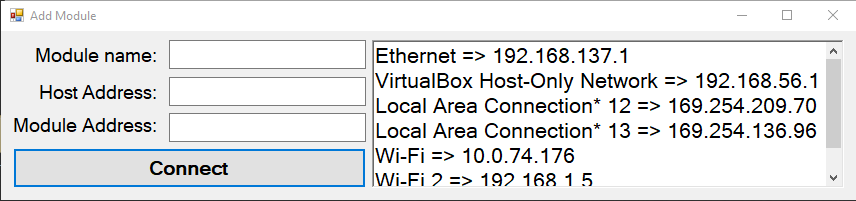
Στη συνέχεια αφού πρώτα έχουμε εγκαταστήσει τους κατάλληλους drivers για το module τηλεμετρίας που έχουμε , επιλέγουμε τη σειριακή θήρα που είναι συνδεδεμένο και το baud rate και πατάμε Connect.